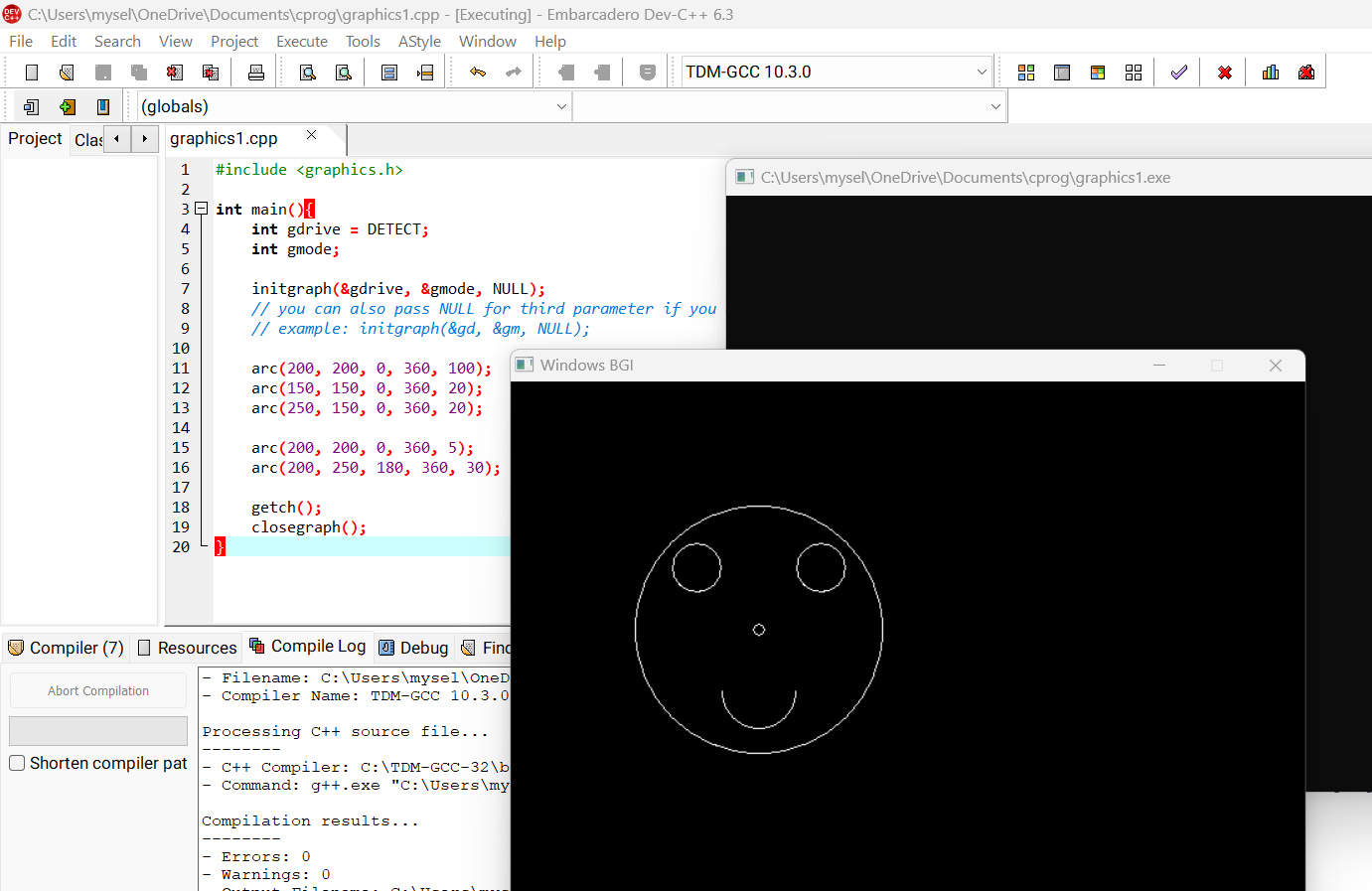
Graphics.h Program
Upon compilation and running, the Borland Graphics Interface window will start and the Drawings will be visible.
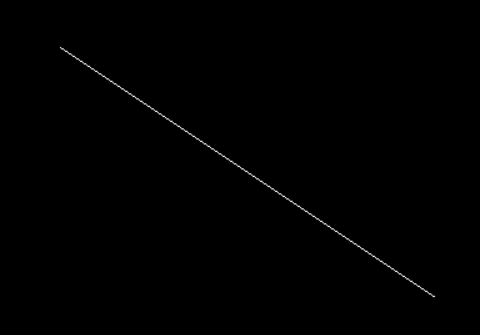
Bresenham's Line Drawing Algorithm
/*Bresnehem*/
#include <stdio.h>
#include <graphics.h>
void drawLine(int x0, int y0, int x1, int y1) {
int dx = abs(x1 - x0);
int dy = abs(y1 - y0);
int sx = (x0 < x1) ? 1 : -1;
int sy = (y0 < y1) ? 1 : -1;
int err = dx - dy;
while (x0 != x1 || y0 != y1) {
putpixel(x0, y0, WHITE);
int e2 = 2 * err;
if (e2 > -dy) {
err -= dy;
x0 += sx;
}
if (e2 < dx) {
err += dx;
y0 += sy;
}
}
}
int main() {
int gd = DETECT, gm;
initgraph(&gd, &gm, NULL);
int x0 = 100, y0 = 100, x1 = 400, y1 = 300;
drawLine(x0, y0, x1, y1);
delay(5000);
closegraph();
return 0;
}
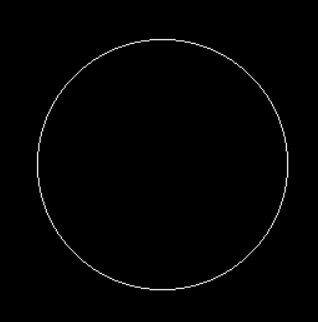
Mid-Point Circle Drawing Algorithm
/*Mid-Point Circle Drawing Algorithm*/
#include <stdio.h>
#include <graphics.h>
void drawCircle(int xc, int yc, int r) {
int x = r, y = 0;
putpixel(xc + x, yc - y, WHITE);
if (r > 0) {
putpixel(xc - x, yc + y, WHITE);
putpixel(xc + y, yc + x, WHITE);
putpixel(xc - y, yc - x, WHITE);
}
int P = 1 - r;
while (x > y) {
y++;
if (P <= 0)
P = P + 2*y + 1;
else {
x--;
P = P + 2*y - 2*x + 1;
}
if (x < y)
break;
putpixel(xc + x, yc - y, WHITE);
putpixel(xc - x, yc - y, WHITE);
putpixel(xc + x, yc + y, WHITE);
putpixel(xc - x, yc + y, WHITE);
if (x != y) {
putpixel(xc + y, yc - x, WHITE);
putpixel(xc - y, yc - x, WHITE);
putpixel(xc + y, yc + x, WHITE);
putpixel(xc - y, yc + x, WHITE);
}
}
}
int main() {
int gd = DETECT, gm;
initgraph(&gd, &gm, NULL);
int xc = 200, yc = 200, r = 100;
drawCircle(xc, yc, r);
delay(5000);
closegraph();
return 0;
}
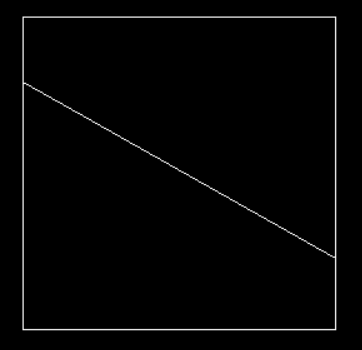
Cohen-Sutherland Line Clipping Algorithm
/*Cohen-Sutherland Line Clipping Algorithm*/
#include <stdio.h>
#include <graphics.h>
#define INSIDE 0
#define LEFT 1
#define RIGHT 2
#define BOTTOM 4
#define TOP 8
#define xmin 50
#define ymin 50
#define xmax 300
#define ymax 300
int computeCode(int x, int y) {
int code = INSIDE;
if (x < xmin)
code |= LEFT;
else if (x > xmax)
code |= RIGHT;
if (y < ymin)
code |= BOTTOM;
else if (y > ymax)
code |= TOP;
return code;
}
void cohenSutherland(int x0, int y0, int x1, int y1) {
int code0 = computeCode(x0, y0);
int code1 = computeCode(x1, y1);
int accept = 0;
while (1) {
if (!(code0 | code1)) {
accept = 1;
break;
} else if (code0 & code1)
break;
else {
int codeOut = code0 ? code0 : code1;
int x, y;
if (codeOut & TOP) {
x = x0 + (x1 - x0) * (ymax - y0) / (y1 - y0);
y = ymax;
} else if (codeOut & BOTTOM) {
x = x0 + (x1 - x0) * (ymin - y0) / (y1 - y0);
y = ymin;
} else if (codeOut & RIGHT) {
y = y0 + (y1 - y0) * (xmax - x0) / (x1 - x0);
x = xmax;
} else {
y = y0 + (y1 - y0) * (xmin - x0) / (x1 - x0);
x = xmin;
}
if (codeOut == code0) {
x0 = x;
y0 = y;
code0 = computeCode(x0, y0);
} else {
x1 = x;
y1 = y;
code1 = computeCode(x1, y1);
}
}
}
if (accept)
line(x0, y0, x1, y1);
}
int main() {
int gd = DETECT, gm;
initgraph(&gd, &gm, NULL);
rectangle(xmin, ymin, xmax, ymax);
int x0 = 10, y0 = 80, x1 = 400, y1 = 300;
cohenSutherland(x0, y0, x1, y1);
delay(5000);
closegraph();
return 0;
}